
ESP-IDF与freeRTOS(八) 事件,通知
事件组
所需头文件event_groups.h
通过宏定义configUSE_16_BIT_TICKS来查看事件组是几位,若宏定义为0是24位。宏定义可通过vscode搜索,我的路径在components\freertos\esp_additions\include\freertos\FreeRTOSConfig.h
这次主要学习xEventGroupWaitBits()函数,该函数不可在中断中调用
// 返回值
EventBits_t xEventGroupWaitBits(const EventGroupHandle_t xEventGroup,//事件组句柄
const EventBits_t uxBitsToWaitFor,//设置需要检查哪些二进制位,此处输入十六进制
const BaseType_t xClearOnExit,//如果设为pdTRUE,退出时清零对应位
const BaseType_t xWaitForAllBits,//设置等待事件组中的位同时(AND)满足或任意一位(OR)满足
TickType_t xTicksToWait);//设置阻塞等待时间
运行结果
可以看到运行时当task2将0或者4置为1时,任务1才会解除阻塞
-------------
task1 begin to wait
-------------
task2 begin set bit0
-------------
In task1, BIT_0 or BIT_4 is set
-------------
task1 begin to wait
-------------
task2 begin set bit0
-------------
In task1, BIT_0 or BIT_4 is set
-------------
task1 begin to wait
-------------
task2 begin set bit0
-------------
代码
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "esp_spi_flash.h"
#include "freertos/event_groups.h"
EventGroupHandle_t EventGroupHandle;
// 定义位,利用左移运算
#define BIT_0 (1 << 0)
#define BIT_4 (1 << 4)
void Task1(void *pvParam)
{
while (1)
{
printf("-------------\n");
printf("task1 begin to wait\n");
/* Wait a maximum time for either bit 0 or bit 4 to be set within
the event group. Clear the bits before exiting. */
xEventGroupWaitBits(
EventGroupHandle, /* The event group being tested. */
// 0,4只要有一位满足
// 此处可用16进制直接设置,如此处0,4位可设置0x11
BIT_0 | BIT_4, /* The bits within the event group to wait for. */
pdTRUE, /* BIT_0 and BIT_4 should be cleared before returning. */
// 此处设置为TRUE则0,4位同时置位才会接触阻塞
pdFALSE, /* Don't wait for both bits, either bit will do. */
portMAX_DELAY); /* Wait a maximum time for either bit to be set. */
printf("-------------\n");
printf("In task1, BIT_0 or BIT_4 is set\n");
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
void Task2(void *pvParam)
{
vTaskDelay(pdMS_TO_TICKS(1000));
while (1)
{
printf("-------------\n");
printf("task2 begin set bit0\n");
xEventGroupSetBits(EventGroupHandle, BIT_0);
vTaskDelay(pdMS_TO_TICKS(5000));
printf("-------------\n");
printf("task2 begin set bit4\n");
xEventGroupSetBits(EventGroupHandle, BIT_4);
vTaskDelay(pdMS_TO_TICKS(5000));
}
}
void app_main(void)
{
/* Attempt to create the event group. */
EventGroupHandle = xEventGroupCreate();
/* Was the event group created successfully? */
if (EventGroupHandle == NULL)
{
/* The event group was not created because there was insufficient
FreeRTOS heap available. */
printf("Event group creat faill!\n");
}
else
{
/* The event group was created. */
// 创建任务前挂起任务调度器
vTaskSuspendAll();
xTaskCreatePinnedToCore(Task1, "Task1", 1024 * 5, NULL, 1, NULL, 0);
xTaskCreatePinnedToCore(Task2, "Task2", 1024 * 5, NULL, 1, NULL, 0);
// 任务创建结束恢复任务调度器
xTaskResumeAll();
}
}
事件组同步
xEventGroupWaitBits()与xEventGroupSync()很相似,可参考如下场景
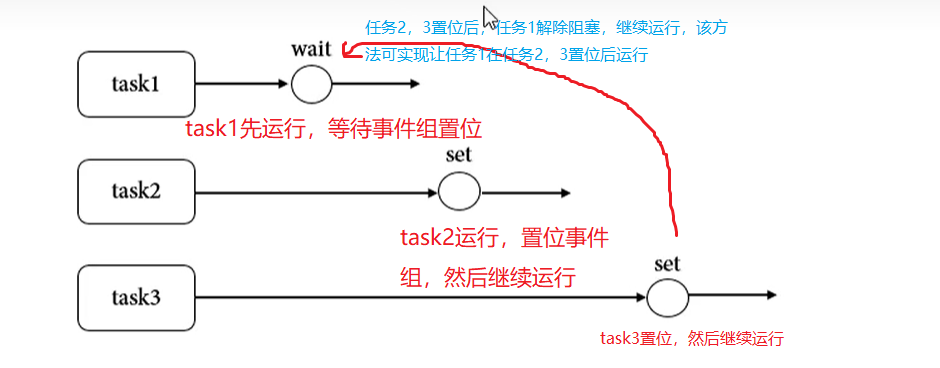
而使用事件组同步的时候,需要同步的任务会阻塞直到最后一个需要同步的事件组置位,然后同时运行,实现同步。
EventBits_t xEventGroupSync(EventGroupHandle_t xEventGroup,//事件组句柄
const EventBits_t uxBitsToSet,//当前任务要设置的位
const EventBits_t uxBitsToWaitFor,//当前任务等待的位
TickType_t xTicksToWait);//等待时间
运行结果
可以看到当3个任务都运行置位之后三个任务才一起执行后面的任务。
-------------
task0 begin
-------------
task1 begin
-------------
task2 begin
--------------
task0 set bit0
--------------
task1 set bit1
--------------
task2 set bit2
task2 sync
task0 sync
task1 sync
代码
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "esp_spi_flash.h"
#include "freertos/event_groups.h"
EventGroupHandle_t EventGroupHandle;
/* Bits used by the three tasks. */
#define TASK_0_BIT (1 << 0)
#define TASK_1_BIT (1 << 1)
#define TASK_2_BIT (1 << 2)
#define ALL_SYNC_BITS (TASK_0_BIT | TASK_1_BIT | TASK_2_BIT)
void Task0(void *pvParam)
{
while (1)
{
printf("-------------\n");
printf("task0 begin\n");
vTaskDelay(pdMS_TO_TICKS(1000));
printf("--------------\n");
printf("task0 set bit0\n");
xEventGroupSync(EventGroupHandle, TASK_0_BIT, ALL_SYNC_BITS, portMAX_DELAY);
printf("task0 sync\n");
vTaskDelay(pdMS_TO_TICKS(10000));
}
}
void Task1(void *pvParam)
{
while (1)
{
printf("-------------\n");
printf("task1 begin\n");
vTaskDelay(pdMS_TO_TICKS(3000));
printf("--------------\n");
printf("task1 set bit1\n");
xEventGroupSync(EventGroupHandle, TASK_1_BIT, ALL_SYNC_BITS, portMAX_DELAY);
printf("task1 sync\n");
vTaskDelay(pdMS_TO_TICKS(10000));
}
}
void Task2(void *pvParam)
{
while (1)
{
printf("-------------\n");
printf("task2 begin\n");
vTaskDelay(pdMS_TO_TICKS(5000));
printf("--------------\n");
printf("task2 set bit2\n");
xEventGroupSync(EventGroupHandle, TASK_2_BIT, ALL_SYNC_BITS, portMAX_DELAY);
printf("task2 sync\n");
vTaskDelay(pdMS_TO_TICKS(10000));
}
}
void app_main(void)
{
/* Attempt to create the event group. */
EventGroupHandle = xEventGroupCreate();
/* Was the event group created successfully? */
if (EventGroupHandle == NULL)
{
/* The event group was not created because there was insufficient
FreeRTOS heap available. */
printf("Event group creat faill!\n");
}
else
{
/* The event group was created. */
// 创建任务前挂起任务调度器
vTaskSuspendAll();
xTaskCreatePinnedToCore(Task0, "Task0", 1024 * 5, NULL, 1, NULL, 0);
xTaskCreatePinnedToCore(Task1, "Task1", 1024 * 5, NULL, 1, NULL, 0);
xTaskCreatePinnedToCore(Task2, "Task2", 1024 * 5, NULL, 1, NULL, 0);
// 任务创建结束恢复任务调度器
xTaskResumeAll();
}
}
消息通知
FreeRTOS还可以通过消息通知来实现同步。
任务可以发送给特定任务一个消息通知,实现对特定任务的唤醒或其他操作。
运行结果
-------------
task1 begin
-------------
task2 notify task1
--------------
task1 got notification
-------------
代码示例
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "esp_spi_flash.h"
#include "freertos/event_groups.h"
static TaskHandle_t xTask1 = NULL;
void Task1(void *pvParam)
{
while (1)
{
printf("-------------\n");
printf("task1 begin\n");
// 阻塞等到消息到来
ulTaskNotifyTake(pdTRUE, portMAX_DELAY);
printf("--------------\n");
printf("task1 got notification\n");
vTaskDelay(pdMS_TO_TICKS(3000));
}
}
void Task2(void *pvParam)
{
while (1)
{
// 首先阻塞自身让Task1进入阻塞状态
vTaskDelay(pdMS_TO_TICKS(5000));
printf("-------------\n");
printf("task2 notify task1\n");
// 发送通知给task1
xTaskNotifyGive(xTask1);
}
}
void app_main(void)
{
vTaskSuspendAll();
// 创建Task1时需要传出Task1的句柄
xTaskCreatePinnedToCore(Task1, "Task1", 1024 * 5, NULL, 1, &xTask1, 0);
xTaskCreatePinnedToCore(Task2, "Task2", 1024 * 5, NULL, 1, NULL, 0);
// 任务创建结束恢复任务调度器
xTaskResumeAll();
}
通知的值
可以通知不同的值,并且根据不同的值来执行不同的代码。
运行结果
-------------
task1 wait notification
-------------
task2 notify task1
task1 process bit0 event
--------------
task1 got notification
-------------
task1 wait notification
task1 process bit2 event
--------------
task1 got notification
-------------
示例代码
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "esp_spi_flash.h"
#include "freertos/event_groups.h"
static TaskHandle_t xTask1 = NULL;
void Task1(void *pvParam)
{
uint32_t ulNotifiedValue;
while (1)
{
printf("-------------\n");
printf("task1 wait notification\n");
xTaskNotifyWait(0x00, /* Don't clear any notification bits on entry. */
ULONG_MAX, /* Reset the notification value to 0 on exit. */
&ulNotifiedValue, /* Notified value pass out in ulNotifiedValue. */
portMAX_DELAY); /* Block indefinitely. */
/* Process any events that have been latched in the notified value. */
if ((ulNotifiedValue & 0x01) != 0)
{
/* Bit 0 was set - process whichever event is represented by bit 0. */
printf("task1 process bit0 event\n");
}
if ((ulNotifiedValue & 0x02) != 0)
{
/* Bit 1 was set - process whichever event is represented by bit 1. */
printf("task1 process bit1 event\n");
}
if ((ulNotifiedValue & 0x04) != 0)
{
/* Bit 2 was set - process whichever event is represented by bit 2. */
printf("task1 process bit2 event\n");
}
printf("--------------\n");
printf("task1 got notification\n");
vTaskDelay(pdMS_TO_TICKS(3000));
}
}
void Task2(void *pvParam)
{
while (1)
{
// 首先阻塞自身让Task1进入阻塞状态
vTaskDelay(pdMS_TO_TICKS(5000));
printf("-------------\n");
printf("task2 notify task1\n");
// 发送通知给task1
xTaskNotify(xTask1, 0x01, eSetValueWithOverwrite);
vTaskDelay(pdMS_TO_TICKS(1000));
xTaskNotify(xTask1, 0x02, eSetValueWithOverwrite);
vTaskDelay(pdMS_TO_TICKS(1000));
xTaskNotify(xTask1, 0x04, eSetValueWithOverwrite);
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
void app_main(void)
{
vTaskSuspendAll();
// 创建Task1时需要传出Task1的句柄
xTaskCreatePinnedToCore(Task1, "Task1", 1024 * 5, NULL, 1, &xTask1, 0);
xTaskCreatePinnedToCore(Task2, "Task2", 1024 * 5, NULL, 1, NULL, 0);
// 任务创建结束恢复任务调度器
xTaskResumeAll();
}